SciPyを使ってバネマスダンパ系のシミュレーションをやってみる
理論
scipy.integrate.odeintでは常微分方程式を解くことができる。
バネマスダンパ系の運動方程式を
の形に書き換えれば解を得られる。
バネマスダンパ系の運動方程式は次の通り。ここでは外力
ここで両辺をで割る。
であることを考慮すれば、現代制御でおなじみの方程式が導かれる
実装
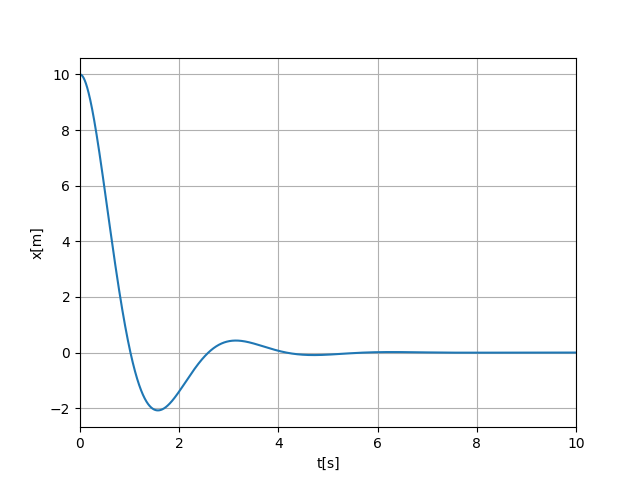
from scipy.integrate import odeint import matplotlib.pyplot as plt import numpy as np #外力 def exForce(u,t): return 0 #運動方程式 def equationOfMotion(u, t, m,c,k): f = exForce(u,t) A = np.array([ [0,1], [-k/m, -c/m]]) b = np.array([0,f/m]) return np.dot(A, u) + b if __name__ =="__main__": #バネマスダンパの係数 m=1 c=2 k=5 args= (m,c,k) #初期値 x0 = 10 v0 = 0 u0=[x0,v0] #計算時間 dt = 0.001 stop = 10 times=np.arange(0., stop+dt, dt) #解 orient = odeint(equationOfMotion, u0, times, args) x=orient[:,0] v=orient[:,1] #グラフ表示 plt.plot(times,x) plt.xlim(0,stop) plt.xlabel("t[s]") plt.ylabel("x[m]") plt.grid() plt.show()
出力結果
外力を変えてみる
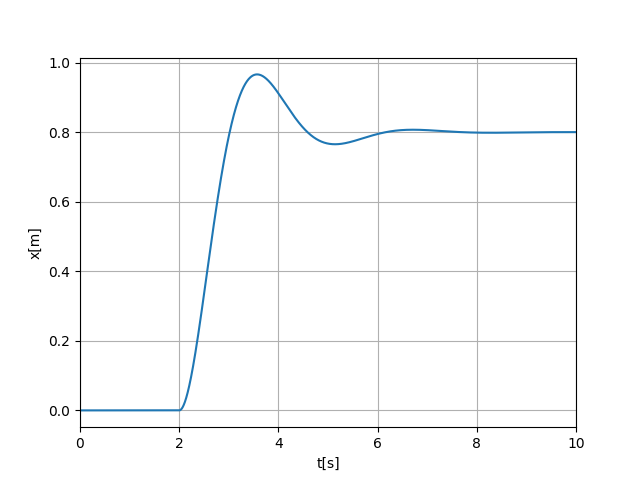
ステップ入力
def exForce(u,t): if(t>2): f=4 else: f=0 return f
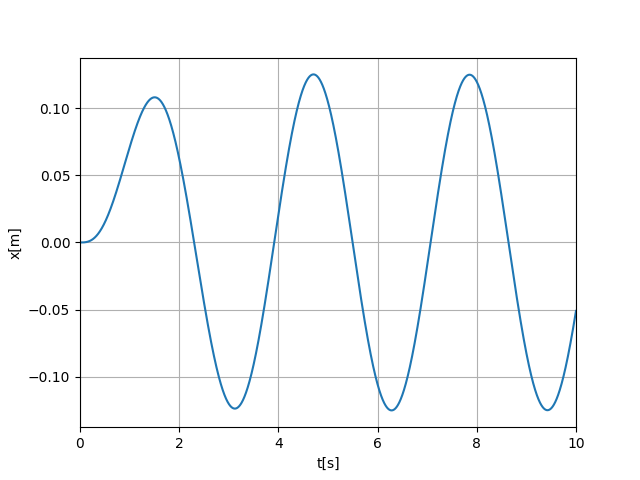
正弦波
from math import sin #外力 def exForce(u,t): return 0.5*sin(2*t)